Build Day 33:
 |
| Shoulder V3 |
I started the day with version 3 of the shoulder. The problem is that it will twist when the legs move back (3 leg mode).
In this version, there is a bit less twist, but it was very tough to build the body around it. I ended up with several "odd" distances, and "even" length pieces, so it would not easily fit.
 |
| Many pins in V4 |
After fighting with it for a while, I decided to create yet another version of the shoulders.
My plan was to make a very solid piece that could not twist. It would have lots of pins.
 |
| Shoulder V4 |
This version would also be better designed to fit into the skin of the body, creating a more solid structure.
 |
| Modified Body to secure shoulders |
The top ring in the body had to be rebuilt, to sit on top of the shoulders, and also add support to the rest of the skin/body.
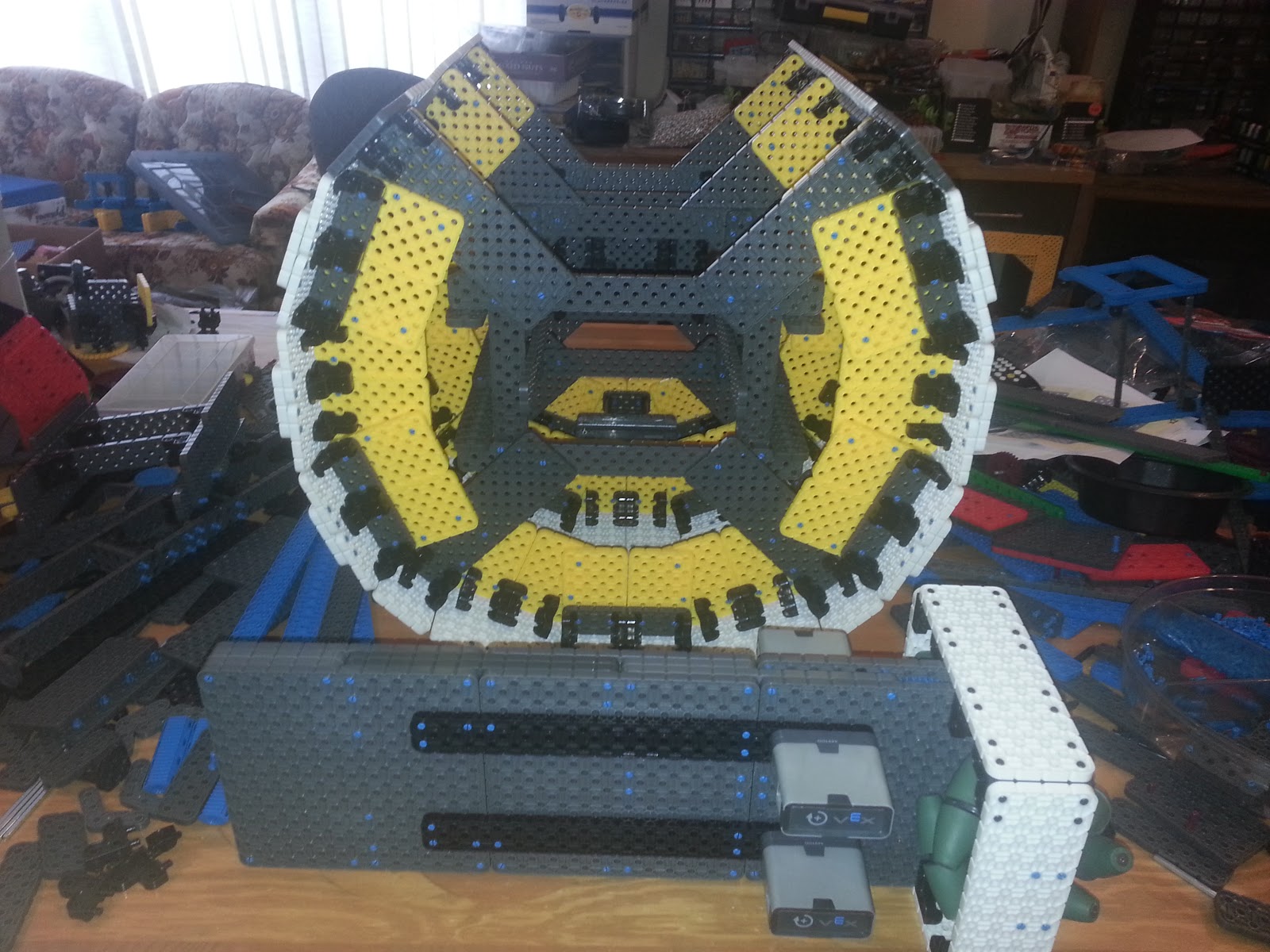
 |
| Solid body |
Final cut-away, before adding the front skin panel.
 |
| Not-so-solid head. (prototype) |
When driving, I sometimes get a little aggressive. The outside legs currently don't have anything to hold them in place.
During this crash, the body held up pretty well, but the head did not survive. That's OK, it was still just a prototype.